この投稿では、Arduino自動街路灯調光回路を構築します。これにより、電力を節約するために道路を通過する車両がないときに明るさを下げることができます。
沿って
概要概要
動物が原因で発生する可能性のある誤検出なしに車両または人間を感知する方法論と、エネルギーを無駄にすることなく光を調光するためのプロトコルを探求します。
街灯は車両が道路に沿って案内するのに役立ちますが、深夜の時間帯はほとんどの道路が空になり、それでもすべての街灯が朝まで点灯します。
道路が空いているときでも一晩中街灯が点灯しているため、街灯を点灯する価値はなく、エネルギー消費によるコストは地方自治体に直接影響します。
この問題をスマートに克服するために、街灯の明るさを希望のレベルまで下げ、車両や人間が通り過ぎるときにのみ完全な明るさで点灯することができます。
これは、政府が電力への支出を削減し、他のエネルギー需要のある目的に使用できる多くのエネルギーを節約するのに役立つ可能性があります。
道路上の活動を検出するために提案されたアイデアは、センサーと障害物(この場合、障害物は車両または人間)との間の距離を測定できる超音波センサーを利用します。
車両がセンサーの範囲に入ると、車両とセンサーの間の距離を決定するためにいくつかの数学的計算が行われます。車両が所定の範囲を下回っていることが確認された場合、搭載されたマイクロコントローラーが街灯を点灯します。最大輝度。
街路灯は、事前に決められた時間、最大の明るさで点灯し、車両や人間がそれ以上検出されない場合は、その明るさを減らします。
これまでに、このプロジェクトの目的はクリアされていたでしょう。提案されたセットアップの回路に飛び込みましょう。
回路動作

自動街路灯調光回路は、プロジェクトの頭脳であるArduinoと、車両や人間を検出するための超音波センサーで構成されています。 arduinoマイクロコントローラーボードに電力を供給するための9Vレギュレーターと、ピーク輝度で数アンペアを消費するLEDを駆動するためのMOSFETが提供されています。
回路全体に十分な電力が供給され、電源が過負荷にならないように、セットアップ用のLEDモジュールと電源を慎重に選択する必要があります。
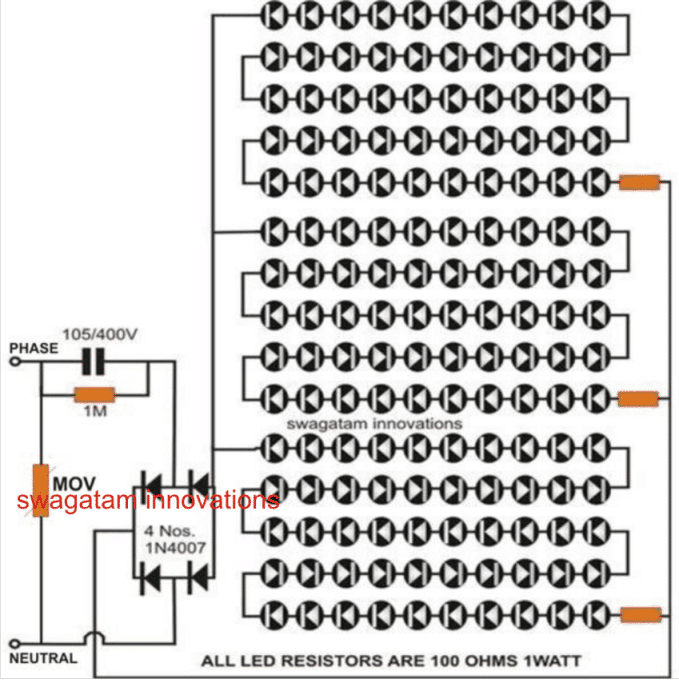
LEDモジュールは、回路図に示されている自家製のものでも、市場向けに購入することもできますが、市場を構築または取得する前に、電源の電圧と電流の要件を計算してください。
電源はSMPSにすることも、変圧器、整流器、電圧レギュレーターを使用して構成することもできます。
LEDはPWMを使用して輝度を下げます。 PWMは方形波であり、LEDへの供給を迅速にオン/オフし、1サイクルでオンとオフの幅を適切に決定します。オン時間とオフ時間の幅によって、LEDの明るさが決まります。
街路灯が最大輝度に切り替わると、LEDへの供給にはパルスがなくなり、安定したDCが供給されます。
セットアップ全体は、以下に示すように実装できます。
セットアップ図
 -
-
“ストロボライトの作り方 ”
超音波センサーは地上約3.5フィートから4フィートの高さにあり、平均的な高さはほぼ同じであり、犬や猫、または通常は街中を歩き回るその他の動物がいる場合、車両と人間のみを検出するようになっています。街灯を最大の明るさにトリガーしないでください。
街を歩き回る動物の身長は3.5フィート未満です。
センサーの高さは、上の写真で説明されているように、最適なレベルで動作するように調整できます。
しきい距離はプログラムで制御できます。
Arduinoが所定の距離より下で検出された障害物を検出すると、LEDライトがピーク輝度になります。
プログラムコード:
//--------------------Program developed by R.Girish-------------------//
const int trigger = A1
const int echo = A2
int vcc = A0
int gnd = A3
int LED = 3
long Time
float distanceCM
float distanceM
float distance = 100 // set threshold distance in cm
int dim = 28 // adjust minimum brightness
int bright = 255 // adjust maximum brightness
float resultCM
float resultM
void setup()
{
pinMode(LED,OUTPUT)
pinMode(trigger,OUTPUT)
pinMode(echo,INPUT)
pinMode(vcc,OUTPUT)
pinMode(gnd,OUTPUT)
Serial.begin(9600)
}
void loop()
{
digitalWrite(vcc,HIGH)
digitalWrite(gnd,LOW)
digitalWrite(trigger,LOW)
delay(1)
digitalWrite(trigger,HIGH)
delayMicroseconds(10)
digitalWrite(trigger,LOW)
Time=pulseIn(echo,HIGH)
distanceCM=Time*0.034
resultCM=distanceCM/2
resultM=resultCM/100
Serial.print('Distance in cm: ')
Serial.println(resultCM)
Serial.print('Distance in meter: ')
Serial.println(resultM)
Serial.println('------------------------------------------')
if(resultCM<=distance)
{
analogWrite(LED, bright)
delay(10000)
}
if(resultCM>=distance)
{
analogWrite(LED,dim)
}
delay(100)
}
//-----------------Program developed by R.Girish-------------------//
注意:
•しきい値の距離は、値を独自のものに置き換えることで調整できます。
フロート距離= 100 //しきい値距離をcm単位で設定
値はセンチメートルで入力する必要があります。最大値は400〜500 cmまたは4〜5メートルです。
•ライトの調光は、を使用して調整できます
int dim = 28 //最小輝度を調整します
255は最大輝度0は消灯です。
シリアルモニターでセンサーと障害物の間の距離を確認することもできます。

このArduinoベースの自動街路灯調光回路に関してさらに質問がある場合は、コメントセクションでお気軽にお問い合わせください。
前:ラボおよびショップ用の誘導加熱器 次へ:タイマー制御のフィットネスジムアプリケーション回路