
死は避けられないものです。しかし、道路での事故や最悪の場合、人の命を永遠に台無しにする可能性のある怪我のために突然死するのはどうでしょうか。考えただけで背骨に震えを送りませんか?事故の背後にある主な理由は何ですか?もちろん、特に高速道路のような滑らかな道路での車両の無謀運転や無謀運転。
統計報告によると、2005年から2009年の間に、約1200人の死者が無謀運転による事故によるものでした。さらに、発疹ドライバーによる事故のニュースをほぼ毎日聞くことができます。
それで、それを防ぐ方法はありますか?もちろん!
良いドライバーになることや交通ルールに従うこと、通常の速度を維持することなど、いくつかの方法があります。しかし、重要な方法が1つあります。それは、車両の速度を監視し、それに応じて監視することです。
これは、車両の速度をチェックする方法を考案することによって技術的に行うことができます。
“電子回路の構築を学ぶ ”
速度を確認する2つの方法:
- 道路側または道路中央に速度センサーを設置する 。
- ビデオ画像プロセッサの組み込み :沿道のポールに設置されたカメラで構成されており、フレームをすばやく連続して撮影することで常に状況を監視しています。トラフィックフローパラメータは、シグナルプロセッサで分析され、それに応じて処理されます。

ビデオカメラによる交通監視を示す画像
- レーンにレーダーを組み込む :レーダーを使用して、マイクロ波帯域の信号を車両に向けて送信し、反射信号の周波数のシフトを分析することで、車両の速度を確認できます。 RADARは、Radio Detection andRangingの略です。送信される信号は、一定の周波数または変化する周波数の信号にすることができます。通常、CWドップラーレーダーは道路側のポールに配備されます。

レーダーを使用した速度検出
- IRセンサーの設置 :IR LEDとフォトダイオードを組み合わせたIRセンサーを使用して、車両の走行距離を監視し、同時にその速度を計算できます。基本的な考え方は、道路の両側にIR LEDとフォトダイオードのペアを頻繁に配置し、車両によるIRLEDとフォトダイオード間の経路の中断を監視することです。
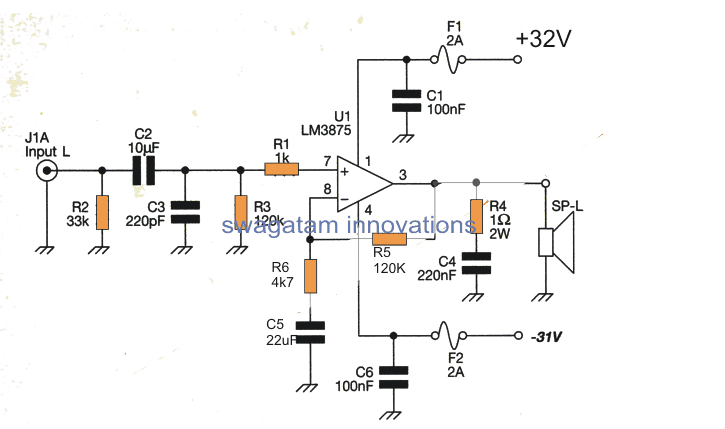
上記の方法の簡単なプロトタイプを次に示します。サンプルプロトタイプは、2組のIRLEDフォトダイオードで動作します。

IRセンサーを使用した速度チェックのプロトタイプ回路 Edgefxキット
次のセクションで構成されています。
- 車両を感知するためのフォトダイオード-LEDペア
- 車両が2つのフォトダイオードLEDペア間のパスを通過するのにかかった時間をカウントして表示するためのカウンター。
- 速度が設定された制限を超えているかどうかを示すブザー。
- 適切なタイミングで信号を提供するタイマーIC。
- LIDARガンの使用 :LIDARは、レーザーベースの検出および測距システムです。交通警察官は、赤外線の短いバーストを送信するポータブルLIDARガンを携帯できます。このライトは移動中の車両によって反射されるため、ガンは反射信号にかかる時間を考慮し、2で割って測定します。距離。速度は、サンプル数を数秒の固定時間で割ることによって測定されます。電波の代わりに光波を使用することを除いて、レーダーシステムと同様に機能します。

交通警官の手にあるLIDAR銃
IRセンサーを使用したスピードチェッカーシステムの動作

IRセンサーを使用したスピードチェッカーシステムの動作を示すブロック図 Edgefxキット
車両がIRLED-フォトダイオードの最初のペア間のパスを通過すると、光の経路が遮断され、フォトダイオードの抵抗が増加し、対応する低信号がタイマーIC1に出力されます。タイマーIC1は、10msの固定期間、出力でHigh信号を生成します。通常の状態では、通常の速度では、2つの間のパスに中断はありませんndフォトダイオード-IRLEDペアとタイマーIC2への対応する入力がハイになり、その出力でローロジック信号が発生します。両方のタイマーからの出力は、タイマーIC3の入力に接続された高出力(低入力と高入力用)を提供するNANDゲート2mに接続されています。タイマーICの対応する出力が低く、ブザーがオフの状態になっています。同時に、タイマIC1からの出力はNANDゲート1の両方の入力に与えられ、タイマIC5のリセットピンに接続されたタイマIC4に与えられるハイロジック出力を与えるローロジック出力を提供します。タイマIC5の出力はそれに応じて高く、カウンタICに高いパルスを与えます。カウンターセクションは、複数桁のカウントを読み取るための4段階のディケイドカウンターで構成されています。各カウンタICクロックは、前のカウンタICのクロック出力に接続されています。カウンタは、クロックパルスの立ち上がりエッジごとにカウントを増やします。
ここで、車両が非常に高速で移動しているため、タイマーIC1に設定された時間内に2番目のIRLED-フォトダイオードペア間のパスに到達するとします。したがって、カウンタは通常のカウントを下回るカウントを表示すると同時に、NANDゲート2が両方の入力でハイになるため、出力がローになり、それに応じてタイマーIC3がロー入力を受信してハイロジック出力を提供します。ブザーアラームをトリガーします。
したがって、2つのペア間の距離をカウンターの読み取り値で割ると、車両の速度がわかります。この速度が指定された制限を超えると、ブザーが鳴り、制限速度に違反していることが明確に示されます。
一つの方法について詳しく説明しました。他の方法はフィードバックとして提供することを歓迎します。
フォトクレジット:
- LIDAR銃を持った交通警官 ウィキメディア







{kind=link}