
ロボットという用語は、1920年にチェコの劇作家カレルチャペックによって最初に導入されました。ロボットという用語は、インテリジェントな機械装置を表すためにも使用されます。ロボット工学はテクノロジーの分野の1つであり、設計、作成、運用、および ロボットの応用 。ロボット工学の言葉は、ロボットという言葉から派生したものです。主に4つあります ロボットの種類 現在市販されているシリアルタイプ、モバイルタイプ、パラレルタイプ、ウォーキングタイプ。ロボットの要素は、マニピュレーター、エンドエフェクター、グリッパー、電源、およびコントローラーです。この記事では、工学部の学生向けのマイクロコントローラーベースのロボットプロジェクトについて説明します。
ロボットとは?
私たちがロボットについて考えるとき、最初に頭に浮かぶのは、それが人間を模倣する機械であるということです。しかし、実際には、ロボットの標準的な定義はありません。ただし、ロボットに必要な基本的な特性がいくつかあります。たとえば、センシング、動き、エネルギー、インテリジェンスなどです。一部のロボットは自分で作業して特定のタスクを実行できますが、他のロボットは人間の介入と支援が必要です。ロボットは、医療、宇宙通信、 軍事用途。
工作機械への支出は、電子および自動車分野で飛躍的に伸びています。業界の調査によると、インドは工作機械に数千ルピーを費やしてきました。費用効果の高いロボットシステムの需要を引き継ぐために、バンガロールベースのロボットがアクティブになり、会社は費用効果の高いロボットの2つであるArtrimusとG4をリリースしました。 Artimusは費用効果の高いロボットアームであり、G4は高速ガントリーロボットです。

マイクロコントローラーを使用したロボットプロジェクト
産業用ロボットとは?
標準化のために国際機関(ISO)によって定義された産業用ロボットは、繰り返し制御され、再プログラム可能で多目的マニピュレーターであり、多くの軸でプログラム可能です。これらのロボットは、部品、材料、およびツールを移動し、製造および生産におけるさまざまなタスクを実行するように設計されています。
現代の産業用ロボットは、エンジニアリングの真の感覚です。これらのロボットは、約100ポンドの負荷を運ぶことができ、再現性を備えて非常に迅速に移動できます。これらのロボットは多くのアプリケーションでプログラム可能であり、自動車産業で組み立て、アーク溶接、およびマテリアルハンドリングアプリケーションに使用されます。

産業用ロボット
工学部の学生のためのマイクロコントローラーベースのロボット工学プロジェクト
次のリストは、学生に役立つ費用効果の高いマイクロコントローラーベースのロボットプロジェクトを提供します。したがって、工学部の学生向けのマイクロコントローラベースのロボットプロジェクトには次のものが含まれます。
テレプレゼンスロボット仮想
このプロジェクトは、テレプレゼンスロボットの設計に使用されます。このロボットでは、カメラが遠隔地に配置され、ラズベリーパイの助けを借りて視覚的なタイプで周囲をキャプチャします。これらのビジュアルは、ユーザーのヘッドセットのバーチャルリアリティに表示されます。
追加機能により、カメラがユーザーの頭の動きの邪魔になり、ユーザーが仮想テレプレゼンスロボットのロボットが配置されている場所にいる場合、ユーザーに即座に体験を与えることができます。この種のロボットは、ユーザーのスマートフォンにインストールされているアプリを使用することもできます。
サッカーロボット
このプロジェクトは、サッカーロボットの設計に使用されます。このロボットは、Androidアプリケーションを使用して、前進、右、後進、左などのさまざまな方向に移動できます。ロボットの速度の動きは、電話の回転角度によって制御できます。スマートフォンを振ると、このロボットがボールを蹴ります。
金属探知用ロボット
このプロジェクトでは、前の車線の金属を検出するために使用されるマイクロコントローラーを使用してロボットを実装します。この種のロボットは、地雷や地中の金属を検出するのに非常に役立ちます。このプロジェクトでは、RFテクノロジーを使用してロボットを制御します。
人間検出用ロボット
アプリケーションに基づいて、さまざまな人間検出ロボットを利用できます。しかし、地震の際、救助隊にとっては、工事中の人を見つけるのに時間がかかるため、非常に困難です。このような状況でこの問題を克服するために、人間検出ロボットが実装され、人間検出センサーを使用して人間の不適切な時間を検出します。この人間検知ロボットは、PCを使用したRF技術により手動で操作できます
MEMSセンサーを介して制御される触覚人差し指
触覚タッチは、道具を持って世界を感じるために使用されます。このプロジェクトでは、障害者が人差し指の方向を追うことができるように、人差し指で検出したロボットを実装しています。
ロボットの経路は連続している場合があり、そうでない場合はポイントツーポイントです。このロボットで使用されているセンサーは、主に人差し指の方向を検出して出力を生成します。この出力は、RF送信機を使用してRF受信機ユニットに送信できます。
RF受信機では、受信機はマイクロコントローラーに命令する信号を取得して、ロボットが特定の方向に移動できるようにします。このシステムは、RFテクノロジー、MEMSセンサー、およびマイクロコントローラーを使用しています。ロボットはMEMSセンサーを使用してコマンドを取得します。送信機セクションでは、このセンサーを人差し指に配置できます。
マイクロコントローラーを使用した無人車両の設計
このプロジェクトは、マイクロコントローラーとGSMネットワークの助けを借りて無人機を実装します。このプロジェクトは、周波数範囲が制限されている、制御が制限されているなどのさまざまな欠点があるため、GSMネットワークを使用したRFリモートコントロールに代わるものです。
土地測量ロボットの実装
このプロジェクトでは、マイクロコントローラーを使用したロボット、つまり土地測量ロボットを設計します。このロボットは、土地の領域を計算し、それを異なるプロットに分割するために特別に設計されています。このプロジェクトには、調査ロボットとその地域の測定モジュールのような2つの部分が含まれています。このロボットの制御は、ZigBeeモジュールを使用して実行できるため、ロボットはプロット全体を移動できます。
ロボットの移動距離の計算は、タイマーの概念を使用して行うことができます。この距離値をPCに送信できます。このシステムでは、2番目の部分は領域測定モジュールを含みます。このモジュールは、ユーザーがプロットの領域を効率的に決定できるように、埋め込みC言語で設計できます。
壁画用ロボット
このプロジェクトの主なコンセプトは、壁画ロボットを実装することです。このロボットは、低コストの塗装設備の実現を支援します。このロボットを設計する主な理由は、壁画に含まれる化学物質が、目や喉の感染症など、人間の画家に健康上の問題を引き起こす可能性があるためです。
手塗りは繰り返し作業をするため、時間がかかります。建設中のロボットと作業員が建設作業に適切に含まれると、人員を削減することで建設手順全体をより適切に管理できます。さらに、複数のアクティビティが同時に発生するたびに、セキュリティに関連する問題のほとんどが解決されます。
ウォールクライミングロボット
このロボットの主な機能は、1つの大きな窓を掃除するためのウォールクライミング用のロボットを設計および開発することです。このロボットは、吸盤真空を使用してガラスの表面に付着します。このロボットは、前面のロボットに接続されているワイパーを使用して窓を掃除します。ウィンドウがクリーニングされると、ロボットはマイクロコントローラーの指示に従ってクリーニングを停止します。
ロボットの外部への密着には、磁力やマイクロスパインなどさまざまな方法がありますが、ここではロボットの密着を実現するために、このシステムでエレクロチャックを開発しています。このロボットの寸法は約690mm倍ですが、重量は約3kg下です。
マイクロコントローラーを使用した4in1ロボット
このプロジェクトは、エッジの検出、ラインフォロー、パスファインダー、障害物の検出などの4つのモードで動作するマイクロコントローラーベースの4 in1ロボットを実装します。このプロジェクトは、ATMEGA168マイクロコントローラーを使用して構築し、スイッチ、センサー、およびLEDを使用して目的を達成できます。
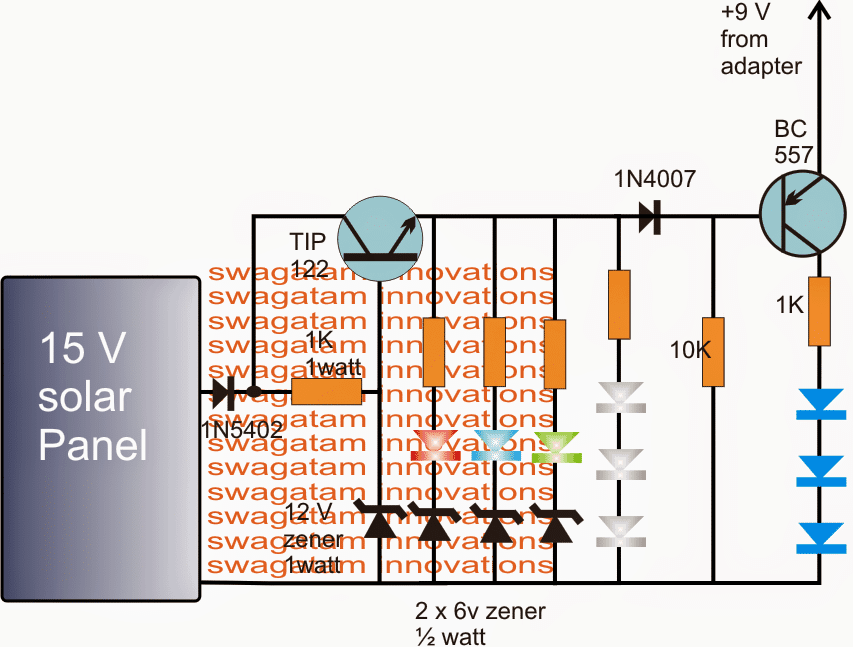
マイクロコントローラーとロボットアームを使用したソーラーパワーツール
ロボットは、人間に取って代わることができる自動化された機械を介して取引し、人間のように見えることを意味します。ロボットの腕は、人間の腕と同じ機能を使用して一般的にプログラムされる一種の機械装置です。太陽エネルギーは明るい光であり、太陽から発生する熱でもあることを私たちは知っています。提案されたシステムは、ロボットの腕を通して太陽エネルギーを介して動力を供給され、物体を拾い上げて配置することができるロボットを設計するために使用されます。
提案システムでは、太陽光発電を動力源とするロボット車両が主に設計された。これは主に、太陽エネルギーを使用する車両の出力を上げるために使用されます。このプロジェクトでは、ロボットアームは、物体を拾い上げて配置するための車両を処理するように設計されています。車両の充電は、直接電源を使用するなどの2つの方法を使用して行うことができ、もう1つは太陽エネルギーの追跡です。したがって、太陽エネルギー全体をロボットが利用して、必要な操作を実行することができます。
パイプライン検査のための移動ロボットの分析と制御
このプロジェクトは、パイプライン検査に使用されるロボットを設計します。このロボットはセンサーを通して設計することができます。このプロジェクトでは、4バー法の加速度と速度の分析を使用してロボットを制御します。このロボットは、送信機と受信機のような2つのセクションを含む8051マイクロコントロールを使用します。
送信機には4つのスイッチがあり、4つの順序を提供しますが、受信機はGSMに接続され、コマンドを取得すると移動ロボットを操作し、ロボットが障害物を検出するとメッセージを送信します。受信機には、GSMを介して障害物を検出するIRセンサーが含まれています。 GSMはインタラクティブ機能の設計に役立つため、問題の発見にかかる時間が短縮されます。
目を使った電動車椅子の制御システム
このプロジェクトは、目を使った電動車椅子の制御システムを実装するために使用されます。この提案されたシステムの制御は、目を通してのみ行うことができます。そのため、身体に障害のある方は、自分で電動車椅子を操作することができます。このプロジェクトを使用することにより、提案されたシステムは上記の力率に対して強力です。さらに、このプロジェクトは人間の目で安全かつ正確に制御できることが確立されています。
RFIDを介してロボットにサービスを提供
このプロジェクトは、RFIDの助けを借りてサービングロボットを設計します。この種のロボットは、待ち時間を短縮することで、レストランやホテル内の顧客への食事の効率を高めるために使用されます。このプロジェクトでは、必要な操作は、PICマイクロコントローラーとRFIDテクノロジーの助けを借りて行うことができます。
携帯電話で操作するランドローバー
このプロジェクトは、知覚、行動、処理の3つの異なるフェーズを使用してロボットの制御を行うことができるランドローバーロボットを実装します。一般的に、プリセプターはロボットに配置されたセンサーに他ならず、マイクロコントローラーを介して処理を行うことができます。このタスクは、モーターまたはアクチュエーターを使用して実行できます。
このプロジェクトのロボットは、ロボット車両に接続されている電話に電話をかけることで電話で制御できます。ボタンに一致するモバイルトーンは、処理終了時に聞こえます。ランドローバーロボットは、ロボット内に積み重ねられた電話を使用して、このDTMFトーンを認識します
Bluetooth制御ロボット
このプロジェクトは、Bluetoothを介して制御されるロボットを実装します。これらのロボットは、Bluetooth通信とともにAndroidフォンから送信される信号を介して操作できます。このプロジェクトで使用される主なコンポーネントは、マイクロコントローラー、DCモーター、およびBluetoothモジュールです。システムとユーザーの間の接続は、マイクロコントローラーが信号処理に使用されている場所であればどこでも、Bluetoothデバイスを介して確立できます。これらのロボットのアプリケーションには、無人ミッションへの遠隔車両が含まれます。
Wi-Fiとマイクロコントローラーを介して制御されるロボット
今日、WiFiは私たちの日常生活の不可欠な部分になり、インターネットにリンクされているさまざまなデバイスは、技術の発展により増加します。このプロジェクトでは、インターネットだけでなく組み込みシステムを使用して統合プロセスを実行できます。
このロボットは、通信モジュールのようなWi-Fiの助けを借りて、Webサイトまたはコンピューターを介して操作できます。このモジュールは、ユーザーとロボット間の接続を設定するために使用する必要があります。このプロジェクトの構築に使用される重要なコンポーネントは、マイクロコントローラー、ESP8266やDCモーターなどのWi-Fiモジュールです。
太陽光発電を利用した水ごみ収集ロボット
このプロジェクトは、太陽エネルギーを使用して水ゴミを収集する革新的なロボットを実装しています。このプロジェクトの主な目的は、水域の表面に溜まる可能性のあるゴミをきれいにすることです。このプロジェクトは、汚染を減らすことができるように水をきれいにするのに役立ちます。
“ブーストコンバーターとは ”
このプロジェクトは、RCリモコンを介して制御できます。このプロジェクトでは、DCポンプを使用して、ナビゲーション用のサーボモーターの方向と配置を制御します。ここでは、ロボットを水上で自立させるために2つのソーラーパネルが実装されています。これらのパネルはバッテリーの充電に役立ち、ワイヤーゲージを使用してガベージコレクションを行うことができます。
RFロボットを使用した野生生物の監視
このプロジェクトは、RFを使用して野生生物を監視するロボットを設計します。このプロジェクトを使用することで、オペレーターは野生動物に近づいて映像を非常に近くで撮影する必要がなくなります。ここでは、ロボットは、ロボットの暗視カメラを使用した暗視システムを使用して、動物の野生生物を観察するために使用されます。このロボットは、RFリモコンを使用してワイヤレスで制御できます。記録されたビデオはPCに保存して動物を見ることができます。
このシステムは、8051マイクロコントローラーユニットを使用してRF送信機から信号を受信し、さらに処理します。これらの信号はRF受信機に送信できるため、マイクロコントローラーはこのデータを処理してモーターを駆動します。ロボット車両を操作できるようにします。マイクロコントローラーがカメラの方向を変更する信号を取得すると、マイクロコントローラーはモーターに転送され、カメラの優先角度に到達します。したがって、野生生物の観察は、暗視カメラを介してロボットを使用して行うことができ、RFリモコンを使用して動物をより近くで見ることができます。
マイクロコントローラーベースのロボット工学プロジェクトのアイデアには、次のものがあります。
- Pick-N-Placeロボットアーム とAndroidによってワイヤレスで制御される動き
- 長距離音声認識を備えた音声制御ロボット車両
- Androidアプリケーションによるナイトビジョンワイヤレスカメラを備えた戦場スパイロボット
- マンチェスターコードデコードは、TVリモートによってロボットの方向を制御します
- 火災検知および制御ロボティクス
- 患者操作のためのインターネットLANを介したロボットアーム制御
- Androidアプリケーションによってリモート操作される消防ロボット
- 暗視無線カメラを備えた戦場スパイロボット
- 消防ロボット車両
- ソフトキャッチグリッパーを備えたPick-N-Place
- 金属探知機ロボット車両
- 携帯電話制御ロボット車両
- ロボット車両に続くライン マイクロコントローラーの使用
- IR制御ロボット車両
- 店舗管理用のタッチスクリーンベースのリモート制御ロボット車両
- 駅間のシャトルへの自動メトロ列車
- 障害物回避ロボット車両
- レーザービーム管理を備えたRF制御ロボット車両
工学部の学生のためのロボット工学プロジェクト
近年、多くの工学部の学生が他のプロジェクトと比較してロボットプロジェクトに大きな関心を示し始めています。ピックアンドプレイスなどのロボット、 ラインフォロー 、ウォールトラック、およびマイクロコントローラーを使用したロボット工学プロジェクトは、学術レベルで人気のあるプロジェクトです。以下のマイクロコントローラーベースのロボット工学プロジェクトと工学部の学生向けのロボットプロジェクトのリストは、学生にとって非常に役立ちます。これとは別に、いくつかの電子機器があります ロボットアプリケーションのエンジニアリングプロジェクト。

工学部の学生のためのロボット工学プロジェクト
- ライブヒューマンアラートおよび検出ロボット
- ワイヤレスPC制御ロボット
- ワイヤレスビデオカメラが搭載されたRFベースのリモート制御ロボット
- 障害物検出のための人工視覚を備えた自律ロボット
- ビデオビジョンを備えたワイヤレスルームフレッシュナースプレーロボット
- シンプルなピックアンドプレースロボット
- タッチスクリーン制御のインテリジェントロボット
- 堅牢な音声認識を使用した人間とロボットのインターフェース
- ワイヤレス制御を備えたLPGガスおよび煙検知ロボット
- PC制御のワイヤレス多目的ロボット
- 音声認識ロボット 火炎センサー表示付き
- 火炎センサーを備えた遠隔制御ロボット
- MCU / RF / IR / PCとインターフェースするロボットアーム
- スピードスプレーヤーロボット
- ソーラーパネル追跡ロボット
初心者のための簡単なロボットプロジェクト
初心者の方は、 簡単なロボットプロジェクト 彼らがそれらを練習することに慣れてきたときに彼らが大きくて複雑なロボット工学に直面するように挑戦するであろう基本的な概念と技術を学ぶために。

シンプルなロボットプロジェクト
- GSMを使用した移動制御ロボット
- エッジ回避ロボット
- ライトフォローロボット
- ロボットを追跡する単純な線
- ウォールフォロワーロボット
- 爆弾探知ロボット
- TRASHのソーラーロボット
- ポケット酔ったロボット
- ソーラーゴキブリVirbobot
- LEDペットを点滅させる
- 扱いにくいロボット-ペーパーモデル
Arduinoロボットプロジェクト
Arduinoはシングルボードマイクロコントローラーであり、そのハードウェアはオープンソースハードウェアボードで構成されています。このハードウェアボードは、8ビットのAtmelを使用して設計されています AVRマイクロコントローラー 、または32ビットのAtmelARM。 Arduinoは、インタラクティブオブジェクトをプログラムする簡単な方法を提供するように設計されています。ここでは、Arduinoのようなマイクロコントローラーベースのロボットプロジェクトのリストについて説明しました。

Arduinoロボットプロジェクト
- ArduinoでOWIロボットアームを制御する
- DFRobotshopRoverまたはArduinoon Tracks
- 音声制御Arduinoロボット
- ArduinoNanoベースのマイクロボット
- Arduinoローバーを作るためのリバースエンジニアリングされたRCカー
- 2WD拡張プラットフォームArduinoロボットシャーシスマートカーシャーシ
- スピードエンコーダー付きArduinoロボット4WDスマートカーシャーシキット
- ヘックスバグスパイダーハック
- 歩くロボットを踏みにじる
- Arduinoボットプロト
- しばらくの間テストするためのArduinoロボット
- ArduinoとMPU6050を使用した2輪セルフバランスロボット
電子工学プロジェクト
私たちの日常生活では、エレクトロニクスが大きな役割を果たしています。ですから、私たちがエレクトロニクスについていくつかの基本的なことを学ぶならば、それは私たちにとって有利です。これらの電子プロジェクトは、コンデンサ、ダイオード、ICなどの概念を含むさまざまな回路を扱っています。現在、多くの人々がさまざまな電子工学の分野に関心を示しています。エンジニアリングのエレクトロニクス部門でいくつかのプロジェクトを行った後、エレクトロニクスの実践的な知識を得ることができます。エレクトロニクスプロジェクトに興味のある方のために、以下のリスト 電子工学プロジェクトとアイデア 重宝します。
- Arduinoベースのホームオートメーション
- ワイヤレス電力伝送 3D空間で
- タイマーに基づくユーザー定義のタイムスロットを備えた産業用液体ポンプコントローラー
- 街路灯のArduinoベースの自動強度制御
- マルクスジェネレーターの原理による高電圧DC
- 電子眼球制御セキュリティシステム
- 長距離 FMトランスミッター オーディオ変調付き
- 時間遅延ベースのリレー作動負荷
- 555タイマーを使用して6VDCを10VDCにステップアップ
- 三相電源の相シーケンスチェッカー
- 自動散水装置を備えた火災または煙探知器
- GSM / GPRSベースのポンプオンおよびオフシステム
- 携帯電話制御IVRSシステム
- 自動街路灯制御システム 高感度LDRの使用
- 高速道路の対向車に応じた自動速度調整
- ロボットの応用
- ロボットアプリケーションは、現在のアプリケーションと将来のアプリケーションの2つのタイプに分類できます。
- 現在のアプリケーションは次のとおりです。
- 材料の移動、機械のロードとアンロード
- 処理操作
- 組み立てと検査
- 将来のアプリケーションは次のとおりです。
- 医療
- 軍事-大砲、装填、監視
- ホームアプリケーション
- 電子産業
- 全自動機械工場
これは、費用対効果の高いマイクロコントローラーベースのロボットプロジェクト、単純なロボットプロジェクト、Arduinoロボットプロジェクト、エンジニアリング学生向けのロボットプロジェクトなどのロボットに関するプロジェクトのリストに関するものです。マイクロコントローラーベースのロボットプロジェクトの理解と概念をよりよく理解していただければ幸いです。以下のコメントセクションでこの記事についてのご意見をお聞かせください。これらのプロジェクトの実装についてさらにサポートが必要な場合は、お問い合わせください。
写真クレジット:
- マイクロコントローラを使用したロボット工学プロジェクト daihen-usa
- 産業用ロボット リンクシック
- 工学部の学生のためのロボット工学プロジェクト electronicshub
- による単純なロボットプロジェクト nootrix
- Arduinoロボットプロジェクト rlocman





{kind=link}