投稿では、動作仕様に影響を与えることなくACモーター速度を制御するための単相可変周波数駆動回路またはVFD回路について説明しています。
VFDとは何ですか
モーターや他の同様の誘導負荷は、製造仕様の範囲外の周波数で動作することを特に「嫌い」であり、そのような異常な条件下で強制されると非常に非効率になる傾向があります。
たとえば、60Hzで動作するように指定されたモーターは、50Hzまたは他の範囲の周波数で動作することが推奨されない場合があります。
これを行うと、モーターの加熱、必要な速度よりも遅いまたは速い、異常に高い消費などの望ましくない結果が生じ、物事が非常に非効率になり、接続されたデバイスの寿命が短くなる可能性があります。
ただし、異なる入力周波数条件下でモーターを動作させることはしばしば強制になり、そのような状況では、VFDまたは可変周波数駆動回路が非常に便利になる可能性があります。
VFDは、ユーザーがモーターの仕様に従って入力電源の周波数と電圧を調整することにより、ACモーターの速度を制御できるようにするデバイスです。
これはまた、VFDを使用すると、モーターの仕様に従ってVFDの周波数と電圧を適切にカスタマイズすることにより、電圧と周波数の仕様に関係なく、利用可能なグリッドAC電源を介してACモーターを操作できることを意味します。
これは通常、異なる周波数キャリブレーションでスケーリングされた可変ノブの形で指定されたコントロールを使用して行われます。
“スーパーコンダクターとは ”
自宅でVFDを作成することは難しい提案に聞こえるかもしれませんが、以下に提案する設計を見ると、結局のところ、この非常に便利なデバイス(私が設計した)を構築することはそれほど難しくないことがわかります。
回路動作
回路は基本的に2つのステージに分けることができます:ハーフブリッジドライバーステージとPWMロジックジェネレーターステージ。
ハーフブリッジドライバステージは、2つのハイサイドMOSFETとローサイドMOSFETをそれぞれ組み込んだ高電圧モータードライブステージを片手で処理するハーフブリッジドライバICIR2110を使用します。
したがって、ドライバICは回路の心臓部を形成しますが、この重要な機能を実装するために必要なコンポーネントはわずかです。
ただし、上記のICは、接続された負荷を目的の特定の周波数で駆動するために、周波数に高いロジックと低いロジックを必要とします。
これらのhiおよびlo入力ロジック信号はドライバICの動作データになり、指定された周波数を決定するための信号と、主電源ACと同相のPWMを含める必要があります。
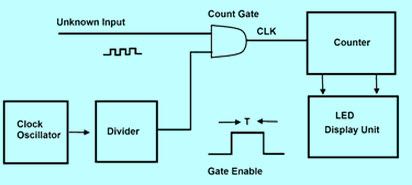
上記の情報は、555個のICと10個のカウンターで構成される別のステージによって作成されます。 IC4017。
2つの555ICは、降圧ブリッジ整流器出力から得られた全波ACサンプルに対応する変更された正弦波PWMを生成する役割を果たします。
IC4017はトーテムポール出力ロジックジェネレータとして機能し、その交流周波数レートが回路のメイン周波数決定パラメータになります。
この決定周波数は、IC1のピン#3から引き抜かれ、IC2のトリガーピンを送り出し、IC2のピン#3で変更されたPWMを作成します。
変更された正弦波PWMは、IR2110に給電する前に4017 ICの出力でスキャンされ、変更されたPWMの正確な「プリント」をハーフブリッジドライバーの出力に、最終的には動作中のモーターに重ね合わせます。
モーターに正しい指定周波数を提供するために、Cxおよび180kポット値を適切に選択または調整する必要があります。
ハイサイドMOSFETのドレインの高電圧も適切に計算し、モーターの仕様に従って適切にステップアップまたはステップダウンした後、使用可能な主電源電圧ACを整流することによって導出する必要があります。
上記の設定により、特定のモーターの1ヘルツあたりの正しいボルト(V / Hz)が決まります。
両方のステージの供給電圧は、アース接続の場合と同じように、共通のラインにすることができます。
TR1は、0〜12V / 100mAの降圧トランスであり、回路に必要な動作電源電圧を供給します。
“双極双投スイッチ ”
PWMコントローラ回路

上の図のIC4017からの出力を、次の図のHINおよびLIN入力に適切に統合する必要があります。また、下の図に示すように、上の図に示されている1N4148ダイオードをローサイドMOSFETゲートに接続します。
フルブリッジモータードライバー

更新:

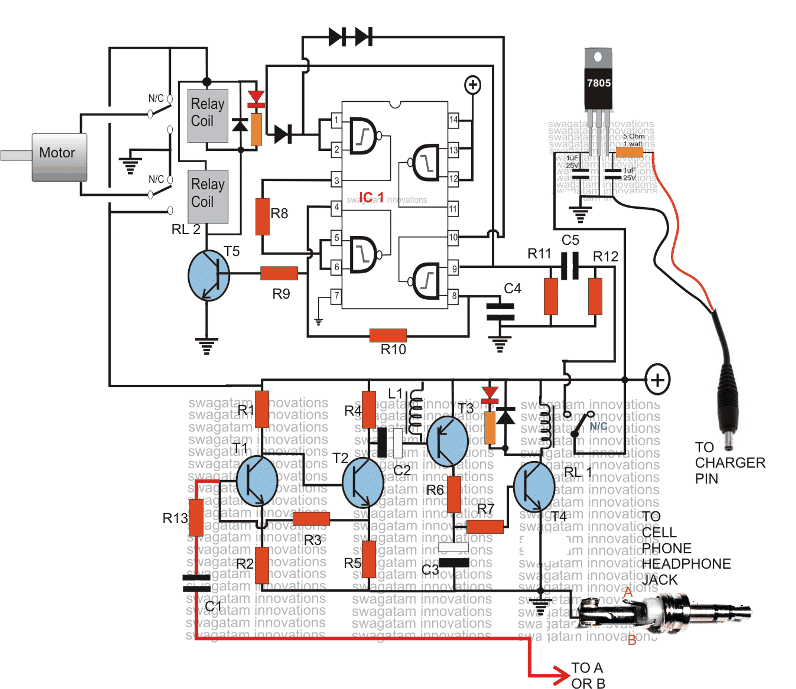
上記の単純な単一VFD設計は、以下に示すように、自励発振フルブリッジIC IRS2453を使用することにより、さらに簡素化および改善できます。
ここでは、フルブリッジドライバに独自のオシレータステージが装備されているため、IC 4017が完全に排除されています。したがって、このICに外部トリガーは必要ありません。
フルブリッジ設計であるため、モーターへの出力制御は、ゼロから最大速度までの全範囲で調整できます。
IC 2のピン#5のポットは、PWM方式でモーターの速度とトルクを制御するために使用できます。
V / Hz速度制御の場合、IRS2453に関連付けられたRt / CtとIC1に関連付けられたR1をそれぞれ(手動で)微調整して、適切な結果を得ることができます。
さらに簡素化

フルブリッジセクションが圧倒される場合は、以下に示すように、P、N-MOSFETベースのフルブリッジ回路に置き換えることができます。この可変周波数ドライバは、ハイサイドにPチャネルMOSFETを使用し、ローサイドにNチャネルMOSFETを使用するフルブリッジドライバセクションを除いて、同じ概念を使用します。
PチャネルMOSFETが関与しているため(RDSon定格が高いため)、構成が非効率に見える場合がありますが、多くの並列P-MOSFETを使用すると、RDSonが低い問題を解決するための効果的なアプローチのように見える場合があります。
ここでは、3つのMOSFETがPチャネルデバイスに並列に使用され、Nチャネルの対応物と同等のデバイスの加熱を最小限に抑えています。
前:MOSFETを保護する方法–基本の説明 次へ:ソーラーMPPTアプリケーション用のI / Vトラッカー回路