記事のこの部分では、電気自動車のペダル押下メカニズムを対応して変化する電気信号に変換する革新的な方法について学びます。これは、自動車の速度制御を処理するためにさらに使用できます。
説明されたコンセプトは、PWMテクノロジーを使用して、ペダルを徐々に踏むと車速を直線的に増加させる電子アクセルのように機能します。
アイデアはロケシュ・マイニ氏から依頼されました
技術仕様
私は機械の男で、現在電気自動車に取り組んでいます。ペダルを使ってモーターの速度を制御したいと思っています。モーター用のコントローラーが手に入らないので、自分で作るのを手伝ってください。
感謝している
モーターの仕様は、36ボルト、43アンペア、1.5hpのブラシ付きDCモーターです。
機械設計
ペダルアクセルの電子バージョンは、主に、ペダルの機械的押し込みを対応する変化する電気信号に最初に変換するメカニズムを必要とし、その結果、この信号は、信号プロセッサステージを介して処理され、車両。
“ノックセンサーの仕組み ”
ピエゾ負荷センサー、静電容量負荷センサー、共振センサーなどを使用するなど、多くの概念を試すことができます。この記事では、同じことを実現するためにLED / LDRアセンブリを組み込んだ私が考案したはるかに簡単な方法を学びます。 。

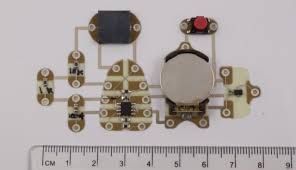
上の図に示されている電気機械的な配置では、次の統合されたコンポーネントを見ることができます。
ネジ機構が付いた小さな歯車。
白いマットリフレクター面を持つネジの頭
ネジ頭の前に配置されたLED / LDRアセンブリ。
提案されたメカニズムがどのように機能するか。
上図に示す歯車は、この歯車の10倍の比率の別の歯車でロックする必要があります。
大きい方のギアは、ペダルを踏むと回転運動を開始するようにペダル機構で構成する必要があります。
ギアからの回転応答により、LED / LDRアセンブリが配置されているチャンバー全体でネジ頭が前方に動きます。
“タイプdヒューズとは ”
このプロセスにより、LEDからの反射光の量が比例して変化し、LDRが受信します。
次に、ペダルの踏み込みに対応するこの変化するデータ(変化する抵抗の形で)を信号プロセッサ回路に供給して、特定の車両の意図された速度制御を実施することができる。
の中に 次の投稿 PWM技術を使用してシグナルプロセッサステージを学習します。
の中に 上記のセクション ペダルの動作を比例して変化する電気信号に変換するための単純な電気機械式コンバーターアセンブリについて学びました。
ペダルアクションのPWMへの変換
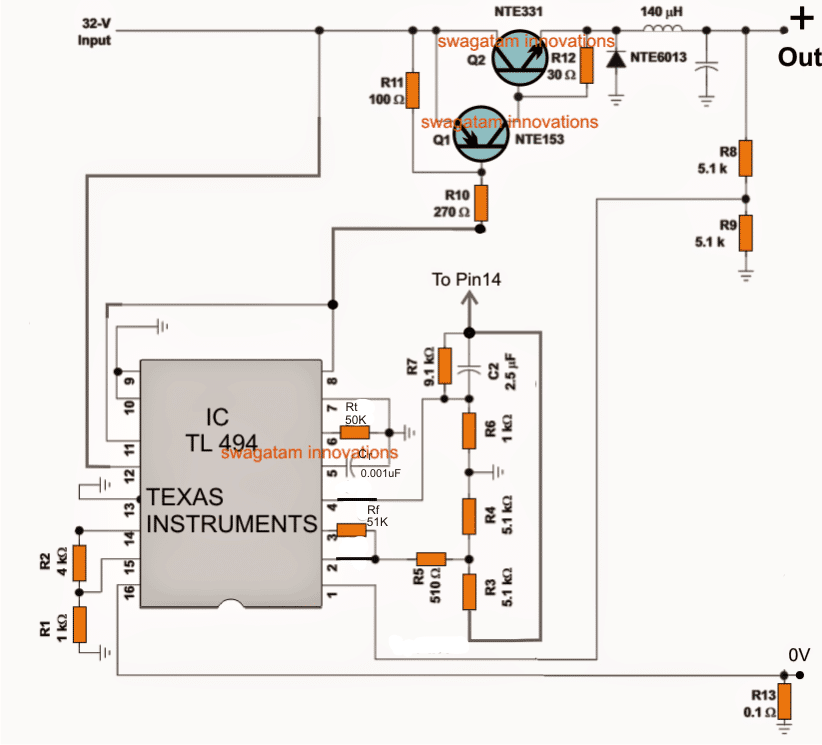
次に、ペダルの電気信号を、車両の目的のモーター速度制御に対応して変化するPWM信号に変換できるようにする回路の実装を調べてみましょう。

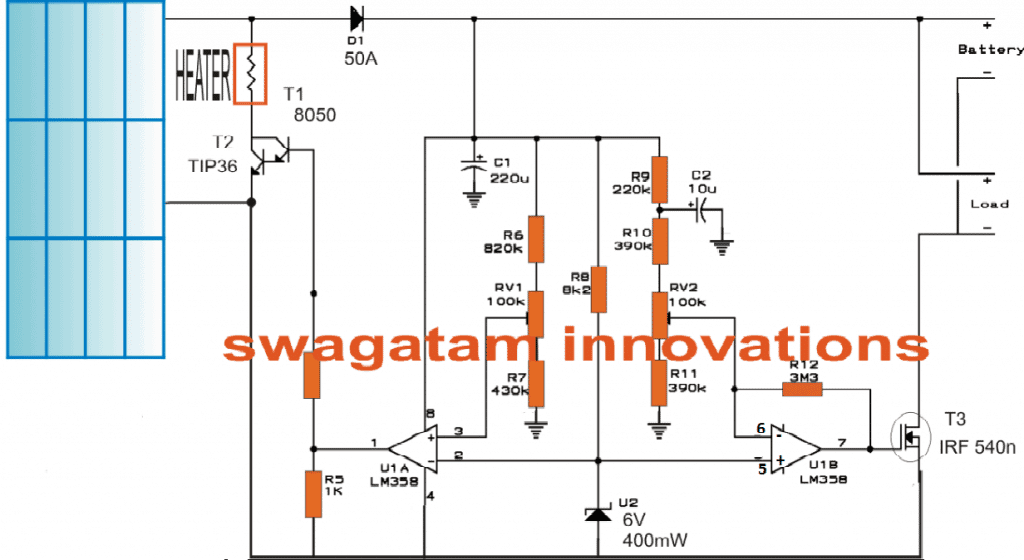
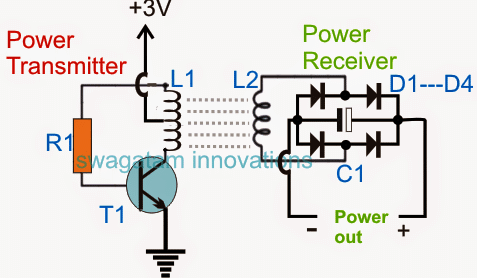
上記の回路図を参照すると、次の点を利用して回路の動作を評価できます。
IC1は、デューティサイクルとして最大オン時間と最小オフ時間を有する80Hzパルス発生器として構成されています。
IC2は、最初にピン2に印加された上記の80Hzパルスを、ピン6で生成された三角波で変換し、三角波をピン5で利用可能な変調電圧と比較するコンパレータとして装備されています。
pin5変調電圧は、ペダル操作から得られるLDR入力にベースが接続された共通コレクターとして構成されたBJTBC547エミッターから得られます。
ペダルを踏んだことに応じて変化する抵抗が100Kのプリセット設定と比較され、トランジスタのベースに比例した大きさの電圧が発生し、IC2のピン5で低電流入力を同等の高電流信号に変換します。
この瞬間的な電位レベルは、IC2によって受け入れられ、処理されて、MOSFETと接続されたモーターに比例した大きさのPWM信号を生成します。
したがって、モーター速度は、車両のペダル踏み込みに応じて変動するPWMに従って制御され、変化します。
上記の手順は、ペダルの動作を車両のモーターとその速度の制御された操作に効果的に変換します。
回路の設定方法。
それは非常に簡単です。
- ネジ頭がLED / LDRアセンブリの前の可能な限り最も近い位置に達するように、ペダルを最大点まで押します。
- 次に、IC2のピン3が最大幅のPWMを生成し始めるまで、100kプリセットを調整します。これは、ピン3の電圧を回路の供給電圧、つまり5Vにできるだけ近づけることで確認できます。
- これが完了すると、セットアップ手順は完了したと見なすことができます。
- ペダルをさまざまなレベルで押し、モーター速度が同じように変化することを確認することで、結果を確認できます。
前:単純なESRメーター回路 次へ:グローライト回路を構築する方法