産業およびエンジニアリング分野の強化に関しては、モーターが決定的な責任を負っています。モーターの広範な利用により、電力と制御の両方のアプリケーションが強化されました。モーターを調整するこの巨大な卓越性により、使用量も毎年増加しています。また、ステッピングモーターは、フィードバックループを使用せずに速度と位置の調整で動作する一種の制御モーターです。この現象は開ループ制御モーターと呼ばれます。したがって、この記事では、ステッピングモーターのタイプの1つについて明確に説明しており、「可変 気が進まない ステッピングモーター」。以下のセクションでは、このデバイスの動作について説明します。原則として、利点と欠点を使用します。
可変リラクタンスステッピングモーターとは何ですか?
これは最も一般的な種類のステッピングモーターです。他のタイプのステッピングモーターと比較すると、最も簡単な設計になっています。回転子部分は磁化されていないため、固定子と回転子の間に引力はありません。 ローター 。このため、可変リラクタンスステッピングモーターは戻り止めを生成しません トルク 。
動的トルクの生成は最小限ですが、モーターが高速で動作しているときにトルクが低下します。したがって、この可変リラクタンスモーターは、主に中速から高速の速度に適用できます。これらのモーターはまた、ノイズの範囲が広いため、ノイズが考慮されていないシナリオに適しています。
原理
基本 可変リラクタンスステッピングモーターの動作原理 それは、ローターデバイスの複数のリラクタンス位置に依存しているということです。固定子相が電圧信号を受信して励起されると、軸線が極を横切る磁場が生成されます。
そして今、ローターが低磁気抵抗を得るような経路で回転しようとすると。この回転は、固定子によって生成される位置磁場軸が、回転子の極(任意の2つの極)を通過する軸と同じであることに対応します。
可変リラクタンスステッピングモーターの構造
主に、このデバイスは、負傷した固定子と複数の歯の回転子セクションで構成されています。固定子巻線は、一連のケイ素鋼カバーで覆われています。一般に、これは、極のペアの間に散在する3つのフェーズでカバーされます。したがって、固定子セクションの極数は、固定子でカバーされている巻線の複数の相でさえ同じです。下の写真では、固定子には同様に分離された12個の投影極があり、すべての極が覆われています。

励起コイル付き。次に、3つのフェーズが DC電源 ソリッドステートスイッチのサポートを通じて。一方、ローターセクションには巻線がなく、スロット付きのスチールカバーで構成された卓越したポールタイプと見なされます。ここでは、固定子の歯と回転子の突出した歯の幅は同じですが、これらのセクションの極の数は異なり、それ自体で始動する機能を提供し、2方向のモーター回転を可能にします。
ここで、三相可変リラクタンスに対応する固定子極と回転子極の関係 ステッピングモーター として与えられます
Nr = ns±(Ns / m)
ここで、「Ns」は固定子の極の数に対応します
「nr」は回転子の極に対応します
作業シナリオ
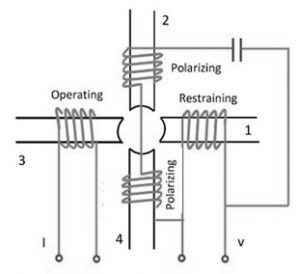
可変リラクタンスステッピングモーターの動作は、3つのケースを考慮することで簡単に説明できます。このデバイスの動作について詳しく教えてください。次の図を検討してください。
動作は、3つの巻線X、Y、およびZが直列に接続され、3つのスイッチS1、S2、およびS3を使用して次々に通電されることで説明されます。
シナリオ1
エッジXXに電源が供給されている場合1、S1スイッチを閉じることによって。 XXの間に磁極があるので1巻線は、磁極間の引力のために、ローターは低い値のリラクタンス位置を達成しようとします。したがって、1および3ローター軸はXXと整列しようとします1極軸。

作業シナリオ1
シナリオ2
端に電源が供給されている場合YY1、その後、固定子極の磁気軸に変更があります。ここで、ローターは、ローターの動きを作成する際に、低リラクタンス方向を達成しようとします。ここでは、回転子極の2軸と4軸がYYに非常に近くなります。1巻線。これにより、ローターの回転が発生し、2つおよび4つのローター軸がYYと整列しようとします。1極軸。したがって、ローターの動きは30度移動します。

可変リラクタンスステッピングモーターシナリオ2
シナリオ3
同様に、ZZ1巻線がS3によって通電されると、XX1とYYが切断されます。回転子軸の磁極は、固定子の軸と整列しようとします。したがって、ローターの動きは30度移動するため、XXから合計60度回転します。1ZZです1。

作業シナリオ3
対応する方法で3つのフェーズが正常に実行されると、モーターは12ステップで1回転を終了します。また、回転子の方向は、固定子相に供給される供給シリーズに基づいています。その場合、デバイスで動作するトルク生成は、Tαiである相電流の2倍に正比例します。二。
長所と短所
ザ・ 可変リラクタンスステッピングモーターの利点 は:
- 加速率の向上
- 操作が簡単で費用効果が高い
- 迅速な動的応答
- 慣性に対するトルクの比率はもっと
ザ・ 可変リラクタンスステッピングモーターの欠点 は:
- 大きな慣性負荷がある場合、容量は最小になります
- 出力電力に制限があります
これはすべて、このデバイスの詳細な概念に関するものです。このセクションでは、可変リラクタンスステッピングモーターの動作、使用法、設計、および動作原理について説明しました。さらに、何を知っている 可変リラクタンスステッピングモーターの用途 複数のドメインでの使用法はです。