投稿では、おもちゃのアプリケーションを実行するために使用される単純なプログラムされた逆順方向モーター回路について説明しています。そのアイデアはマシュー氏から要求されました。
技術仕様
私はあなたのウェブサイトの新しいフォロワーです。これは素晴らしいリソースです!
回路設計のお手伝いが必要です。
私の娘は、自動車である学校のプロジェクトを持っています。瞬間的なスイッチが数秒間前進運動をアクティブにする2段階の時限回路を構築できるようにしたいと思います。
次に、極性を逆にして、数秒間逆の動作をします。モーター電圧は3vになります。このビルドを支援できれば非常に役立ちます。前もって感謝します。
マティ。
デザイン
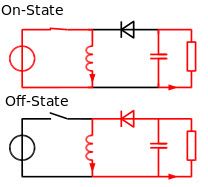
順次遅延タイマー回路を使用した自動正逆作動を特徴とする提案されたモーター玩具回路は、次の図で視覚化することができます。
上の図を参照すると、T1、T2ステージは、関連するコンポーネントとともに、目的のモーター逆順方向タイミング周期に対応する発振器周波数周期を持つ非安定マルチバイブレータを形成します。
TIP127ステージは、回路の押しボタンスタートを可能にするためのラッチ回路です。
IC4017は、Q1〜 ---- Q4からなるトランジスタドライバ段の順方向および逆方向パルスを実行する。

トランジスタドライバは、IC4017出力から受信されたトリガーに応答してモーターの逆順方向運動を容易にするためのHブリッジとして構成されている。
回路は次の説明の助けを借りて理解することができます:
押しボタンが瞬間的に押されると、T3はスイッチを介して短い接地パルスを受信します。これにより、トランジスタがオンになり、回路に正のパルスが供給されます。
初期化トリガーにより、IC 4017のピン4にロジックローが表示され、プッシュボタンを離した後でもT3を保持して確実なオン位置にラッチします。
同時に、ピン15は、ピン3がロジックハイで始まるようにICをリセットする正のパルスも受信します。
pin3を最初に高くすると、ブリッジネットワーク全体のモーターワイヤの極性に応じて、Hブリッジとモーターが特定の方向に作動します。
ここで、T1とT2がカウントを開始し、設定時間が経過すると、ピン14はT2のコレクタからトリガーパルスを受信し、ピン3のハイロジックをピン2にシフトさせます。
上記の条件により、Hブリッジの極性が即座に元に戻り、ICのピン14に次のパルスが到着するまで、モーターは反対の動きを開始します。
後続のパルスがIC4017のピン14で検出されるとすぐに、ICのピン2のハイロジックが1ステップ進み、ICのピン4に落ち着きます。
ただし、ピン4はT3に関連付けられているため、このピンのHighはすぐにT3をオフにし、その結果、ラッチが壊れて回路全体の電源がオフになります。
おもちゃのモーター回路は、プッシュボタンがもう一度押されるまで完全にオフになります。
0.1uFのコンデンサをR2と並列に接続して、電源をオンにするたびにT2が最初にオンになり、設定された時間間隔でシステムを正しく実装できるようにする必要があります。
時間遅延の調整
時間間隔は、R2 / R3またはC1 / C2のいずれか、またはこれらのペアの両方の値を変更することにより、ユーザーの好みに応じて設定または調整できます。
回路はここではおもちゃとして実装されていますが、多くの興味深い産業用アプリケーションがあり、ユーザー指定のプログラムされたいくつかのマシンアクティベーションを実行するように変更できます。
前:オートバイと車用のLEDブレーキライト回路 次へ:リモート制御シーリングファンレギュレータ回路